Inertial/satellite integrated navigation is commonly used for mobile robots operating in outdoor environments. The inertial navigation system has the advantages of complete autonomy, strong anti-interference, good concealment ability and comprehensive output parameters, but its robustness is extremely low, and the error will continuously accumulate and divergence over time. The satellite navigation system has the advantages of high precision, wide positioning range and error accumulation over time, but its disadvantages are poor autonomy, vulnerability to external occlusion and interference, and low frequency of receiver data update. Therefore, the two are often combined and used in engineering to form a satellite/inertial integrated navigation system.
Based on the low-power MSP430F149, this paper designs high-speed acquisition and high-speed combined transmission of navigation information such as satellite navigation (GNSS) receiver, inertial measurement unit (IMU) and air pressure height, and performs preliminary navigation and location information fusion. The navigation system can provide direct navigation services for outdoor mobile robots, and can also be used as a high-speed acquisition system for the original measurement information of high-precision integrated navigation systems.
The key of system design is to realize the parallel acquisition of multi-sensor information by using the limited interface resources of single-chip microcomputer, design an effective data synchronization method, solve the problem of inaccessibility caused by the leak of the pressure sensor data manual, and give the basic method of robot combination positioning. . The system makes full use of the capabilities of the MSP430F149 microcontroller, and has the advantages of simple structure, low power consumption, and universality for sensors.
1 overall design
The system consists of power supply, barometer interface, IMU interface, GNSS receiver interface, SPI to UART module and MSP430F149. The system composition is shown in Figure 1.
The function realization of the integrated navigation system is divided into five parts: IMU data receiving and parsing, GNSS data receiving and parsing, barometer data receiving and parsing, combined navigation solving and data output. The IMU data receiving and parsing function is used to obtain the acceleration and angular velocity information required in the navigation solution; the GNSS data receiving and parsing function is used to obtain the position and velocity information (loosely coupled combination) or GNSS pseudorange and pseudo required in the navigation solution. Distance ratio (tight coupling combination); barometer data receiving and parsing function is used to obtain height information; combined navigation solving function is the core of the system for combined navigation solution; data output includes integrated output and solution of original data packet The output of the result.
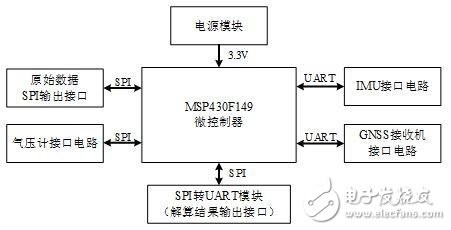
Figure 1 system composition diagram
The inertial device and GNSS receiver used in this article are RS-232 level UART interfaces, which are versatile, and users can consider devices with different precision according to cost. The barometer was selected from MS5803-02BA produced by MEAS of the United States and has been cured in the circuit.
Body Bag,Storage Big Bag,Disposable Body Bags,Waterproof Body Bags
Ningbo Anbo United Electric Appliance Co.,ltd , https://www.airfryerfactory.com